Stratux is a project to provide ADS-B data to ‘electronic flight bag’ apps. It can receive “next gen” transponder information, as well as weather and advisories from ground stations. A GPS module provides location, and gyros, accelerometers, magnetometers, and pressure transducers can even provide limited attitude and heading reference (AHRS)
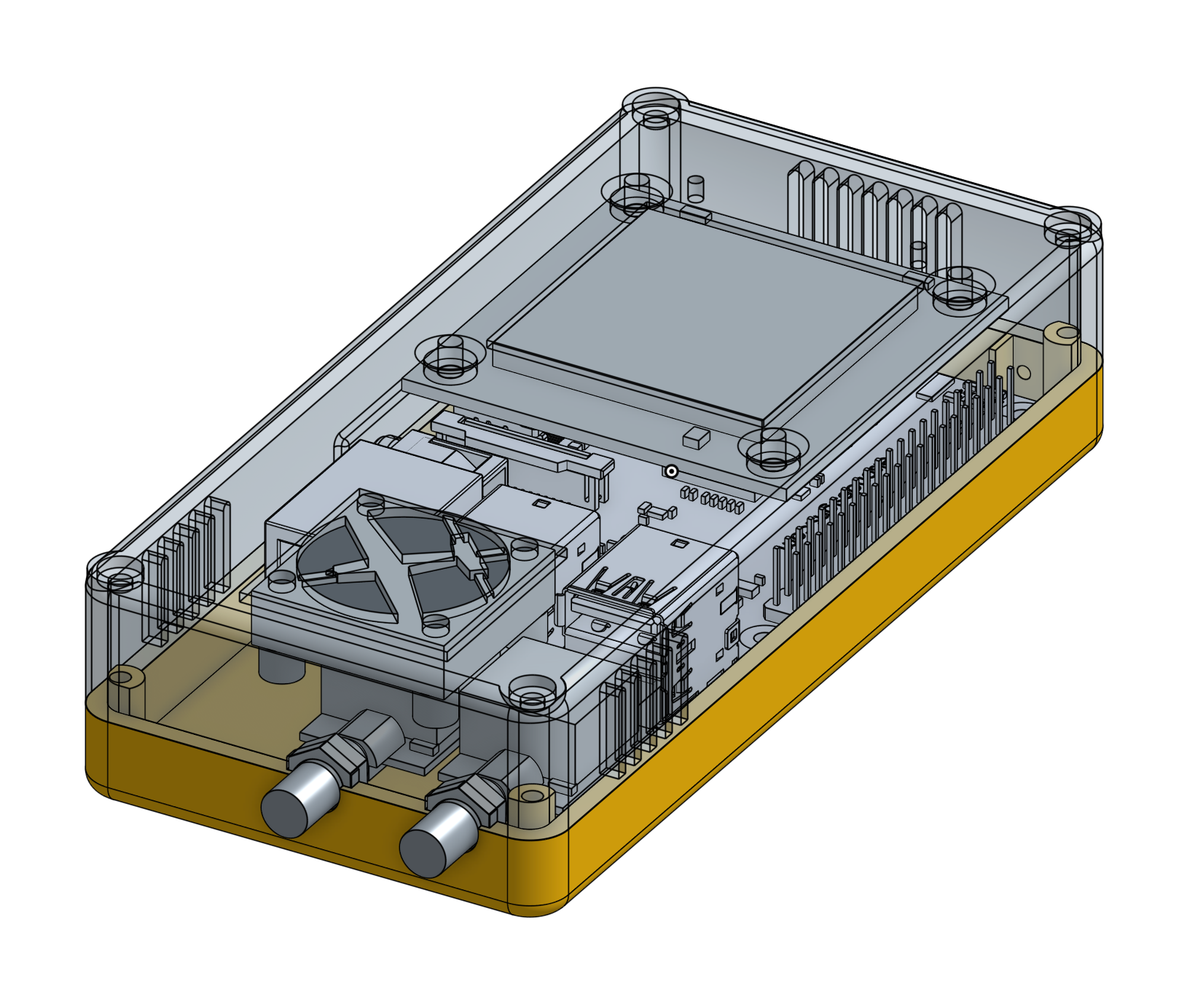
I took some time to design a nice case that holds all the components. I designed a “HAT” for the Raspberry Pi that holds the GPS module and provides fan control. (Originally this Pi Hat had GPIO 4 controlling the fan. I’ve updated the design to use GPIO18, which is used by other Stratux fan controllers and by the software. I have not made or tested this revision.)